Optimization
Code distribution (right-click and "Save as"): optimization.zip
As we saw with the wall finder system (week 2) and wall follower system (week 3), performance of a feedback control system depends critically on gain. In this exercise, we will develop a framework for choosing gains "optimally."
1) Dependence of Performance on Gain
Our goal is to develop tools to choose parameters of a system that optimize performance. To make this process concrete, we will develop these tools in the context of the following system, which is similar to the wall-finder system from Design Lab 2, but with the time step T=1 second.

1.1) Dependence of Poles on Gain
Write a function make_system_model that takes a gain K as input
and returns an instance of System to describe the example
system above with that gain. Write your code in optimize.py and debug with
IDLE.

Now use your make_system_model procedure to calculate the poles that result
for K=0.01, 0.25, 1, and 2.
Enter the poles you calculated for the system with the following values of K, as a Python list of (possibly complex) numbers.
1.2) Dependence of Unit Sample Response on Gain
We wish to characterize performance by calculating figures of merit based on the system's unit sample response.
The SystemSimulator class can be used to create simulators for any system.
This simulator representation will allow us to determine the output of the
system for arbitrary input. If we had a System instance called x, for example,
we could make a simulator for that system with: sim = SystemSimulator(x).
Then we could find the system's response to a particular input by calling its get_response method
(see the documentation for more details).
Calculate the unit-sample responses that correspond to
the gains in Section.1. Plot your results, and save the plots. We have included
code in optimize so that you can generate a plot of the values in the
list ylist by calling the stem_plot function:
> stem_plot(ylist)To run this code in
IDLE, you must include the -n switch:
> idle3 -n &
For each of the gains below, enter a Python list containing the first 10 samples of the unit sample response of the resulting system (n=0 to n=9), assuming the system starts at rest:
2) Figures of Merit
To develop more quantitative figures of merit, we have provided code that
lets you directly compare pole locations and unit-sample responses. This code
uses your procedure make_system_model (to determine pole locations and
corresponding unit sample response). You can invoke the viewer by running
view_root_locus(), which will produce the following window
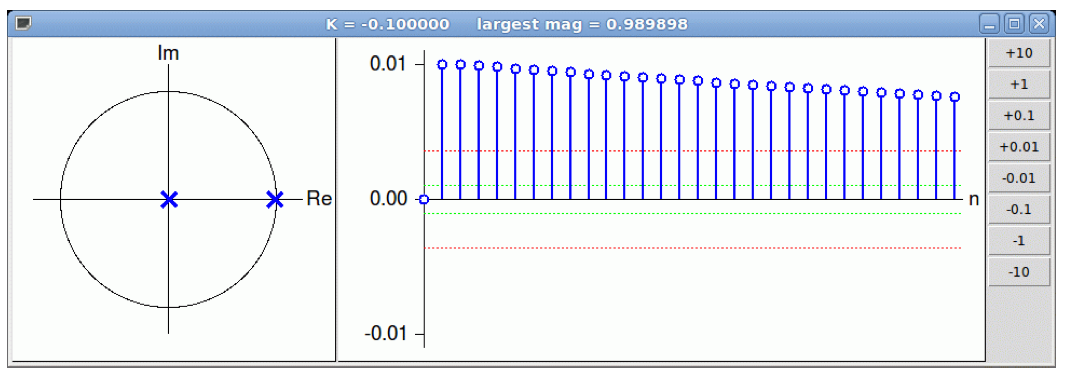
where the poles are shown as complex numbers on the left, the unit sample response is shown in the center, and a column of buttons on the right allow you to increase or decrease the value of K. The scales indicate the maximum values in the plot. The red and green dotted lines indicate the maximum divided by e and 10, respectively.
2.1) Optimality
Use the viewer to determine the following five "optimal" values of K:
K_m =~
K_{10} =~
K_e =~
K_s =~
K_d =~
2.2) Definitions
3) Optimization
We wish to automate the procedure of finding the "optimal" gain. As we saw in the previous section, there are many ways to define "optimal." In this section, we will focus on finding K_d because the underlying metric (i.e., the bounding geometric sequence that converges fastest) is both easy to calculate and useful in a variety of applications. The following plot shows how the magnitude of the dominant pole depends on K for the system in Section 1.

K_d is the value of K that corresponds to the minimum magnitude (here K_d=1/4). In this section, we will explore two methods for finding K_d for arbitrary systems. Since K_d is the minimum of a function, we will look at finding minima of arbitrary functions numerically.
We will consider two different strategies for optimizing functions, and we will compare their performance in different scenarios.
3.1) Linear Optimization
Let's say we want to find, for some function f, the value x
such that f(x) is minimized. We will concern ourselves with finding
x accurate to within some threshold.
One strategy for doing this is to compute f(a) for a number of values
of a, within some specified range. We can start with a equal
to the lower bound of the range we are checking, and then increment a
by the specified threshold until a is no longer in the specified
range. We can compute f(a) for each of these values, and then look
through the results for the value that minimized f(a).
Write a procedure called minimum_linear to implement this
strategy. Your procedure should take the following inputs:
and should return a tuple (xBest,fBest), where xBest
represents the value of x for which f(x) is smallest, and
fBest represents f(xBest). xBest should be within
threshold of the x value where the true minimum occurs.
As a test, use your minimum_linear procedure to find K_d
for the problem in Section 2
Paste your definition for the minimum_linear procedure
below. Do not include import
statements.
3.2) Bisection
Notice that the minimum of the function separates regions where the slope of the function is negative (here K\lt 1/4) from regions where the slope is positive (K \gt 1/4). This change in the sign of the slope is a very general property of minima (or maxima) of a function. We can take advantage of the changing sign property to automatically find the minimum of a function (say f(x)) as follows. Assume that we are given a small value of x (say x_0) for which the derivative f'(x) is negative and a large value of x (say x_1) for which the derivative f'(x) is positive. If f(x) is a "smooth" function of x and if it has a single minimum value, then the minimum occurs for x_0 \lt x \lt x_1. We can halve this range as follows:
- Define the midpoint x_2={1\over 2}(x_0+x_1).
- Calculate f'(x_2).
Now if f'(x_2)\lt0, we know that the minimum occurs for x_2\lt x\lt x_1. Alternatively, if f'(x_2)\gt0 we know that the minimum occurs for x_0\lt x\lt x_2. In either case, we have halved the interval. We can repeat this procedure to determine the location of the minimum to arbitrary precision. This method, which is called bisection, is an example of "divide-and-conquer."
Write a procedure called minimum_bisection to implement the bisection
method. Your procedure should take the following inputs:
and should return a tuple (xBest,fBest), where xBest
represents the value of x for which f(x) is smallest, and
fBest represents f(xBest). xBest should be within
threshold of the x value where the true minimum occurs.
Hint: We can use the procedure to evaluate f(x) to approximate the slope at x numerically, e.g.,
where \delta represents a small number, say 10^{-6}.
As a test, use your minimum_bisection procedure to find K_d
for the problem in Section 2
Paste your definition for the minimum_bisection procedure
below. Do not include import
statements.
4) Comparison
Answer the following questions comparing minimum_linear and minimum_bisection.
minimum_linear for certain function
f over a certain range with a certain threshold and receive a result
accurate to within the specified threshold.
If the range were doubled, would we still expect minimum_linear to return
a result accurate to within the specified threshold?
minimum_bisection for certain function
f over a certain range with a certain threshold and receive a result
accurate to within the specified threshold.
If the range were doubled, would we still expect minimum_bisection to
return a result accurate to within the specified threshold?
minimum_linear for certain function f over a
certain range with a certain threshold calls the function a number of times
n.
If the range were doubled, roughly how many times would we expect f
to be called?
minimum_bisection for certain function f over a
certain range with a certain threshold computes the derivative of f a
number of times m.
If the range were doubled, roughly how many times would we expect the derivative
to be computed?
minimum_linear for certain function f over a
certain range with a certain threshold calls the function a number of times
n.
If the threshold were decreased by a factor of 100 (e.g., from 1 to .01), roughly
how many times would we expect f to be called?
minimum_bisection for certain function f over a
certain range with a certain threshold computes the derivative of f a
number of times m.
If the threshold were decreased by a factor of 100 (e.g., from 1 to .01), roughly
how many times would we expect the derivative to be computed?